Welcome to 4Z5LV home page.
My first meeting with amateur radio was at 1985 on the club station UC1OWK
First radio amateur license issued at 1994, and my first personal callsign was EW8DP.
And since 2001 when I moved to Israel my callsign is 4Z5LV.
My interest in HAM Radio:
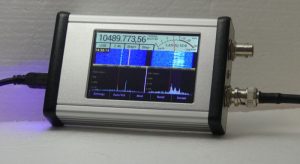
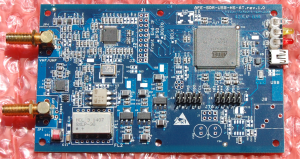
- At first place it is home building and design of amateur radio equipment, today it is area of SDR experiments and microwave, EME communication, digital signal processing.
- At second place it is QSO – I think it is my prize for successful hardware construction.
- Different Digital mode
- Satellite TV reception (it is not connected directly to Amateur radio, but microwave technology)
I am not a contest-men… despite, sometimes you can meet me in some contest (like Hollyland Contest, or some other), but believe me – it is exclusion of my non written rule. I am very far from winner-looser psychology (inner words – balls measuring technology, HI :-). My target it is a new knowledge.