Azimuth / Elevation mechanic and control
Azimuth movements is done by AlfaSpid BigRAK rotator, controlled by its own control box.
Elevation movements is done by 36” linear actuator for Satellite TV, controlled by home maid control box with microprocessor MSP430F149 from Texas Instruments.
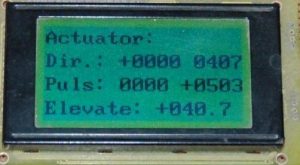
To calculate real elevation angle – the elevation controller uses simple algorithm, where number of pulses (from embedded in actuator pulse encoder), actuator and dish mounting geometric dimensions are used in elementary triangle equations see image below:

We can see triangle that is formed by dish support two sides “a” and “b” and linear actuator “c”,
where sizes of two sides “a” and “b” is constant and one side “c” – has changing size that in reality defines elevation angle of the dish. Size is changing, but we can know it with relatively high resolution using actuator’s encoder pulses. relation between sides “a”, “b” and “c” is defined by next equation:
c2 = a2 + b2 – 2*a*b*cos(angle_between_sides_a_and_b);
So we can easy calculate angle_between_sides_a_and_b (in degrees) and from equation below find elevation angle:
elevation_angle = 180 – offset_angle – angle_between_sides_a_and_b;
where: offset_angle – is constant angle, that defined by dish support construction (can be easily measured or calculated).