There is short description of my 23cm EME setup:
Since October 2020 the EME part of 23cm band as well as 9cm, 6cm and 3cm bands are fully banned or hardly limited ( EME use) for Amateur radio operators, so no more plans to be active on 23cm from Israel…
Shame on IARC (Israel Amateur Radio Club), no HAM spirit in this organization anymore…
In addition in December 2013 my EME dish was damaged by hard snow load (snow in Israel !!! – I’ve not designed mechanics for this case), so since this time it is not operational for EME and used for Satellite TV.
- First one is initial variant that uses unmodified 1.8m dish and Azimuth/Elevation mechanic

My first QSO with PI9CAM was done at 8:40 UTC 10-07-2010 using 1.8m dish and 10W output power.
Next step – I added to the dish above 1.8m dish “extra size”, extended it by mesh up to 2.6m diameter, shape is not exactly parabolic, but gave me gain improvements close to expected

So my present EME Setup is:
Transverter: self maid 1296Mhz/28Mhz + Yaesu FT897D / AFEDRI SDR (on RX)
Antenna: 2.6m dish (1.8m SatTV dish extended by mesh)
Feed: OK1DFC
LNA: G4DDK ~0.3dBNf
There you can download and hear recorded I/Q file of DUBUS CW EME Contest that was done on my system using AFEDRI SDR receiver + 1296MHz/28MHz transverter.
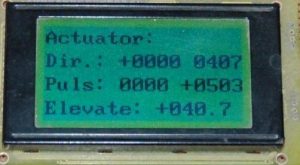
next page has information about my dish’s Azimuth/Elevation control.